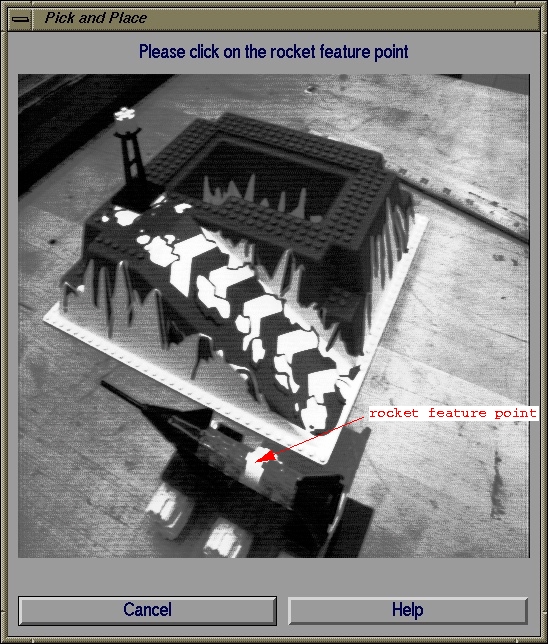
To identify the feature for the computation, you need to select a point within the white area on the rocket. Try to select a point in the center of the area and try to click on the same point from both of the stations.
If you select a point not within the white area on the rocket, then the resulting 3D point will be inaccurate, and you may send the robot flailing out in space, crashing into the ground, or hitting another object: all of which will make the task fail.
 Up to A Pick and Place Task Using a Calibrated Camera
Up to A Pick and Place Task Using a Calibrated Camera
 Next to Identifying the Place Feature
Next to Identifying the Place Feature