Scaling Up and Distilling Down
Language-Guided Robot Skill Acquisition
www.cs.columbia.edu/~huy/scalingup/
Skill Learning
Skill Learning
plan
new tasks
acquire robot skills?
Behavior Cloning
Diffusion Policy , Chi et al, RSS 2023.
✅ reliably produces robust robot skills
Behavior Cloning


✅ reliably produces robust robot skills

❌ reliance on human demonstration collection
Scalable
Skill
Learning
Reinforcement Learning
✅ automatic data collection and policy learning
Reinforcement Learning
✅ automatic data collection and policy learning
❌ exploration in sparse reward and long-horizon
Scalable
Skill
Learning
How can we get a
Unified Framework
for
Scalable Skill Learning?
Language-guided Robot Data Generation
&
Language-conditioned Robot Policy Learning
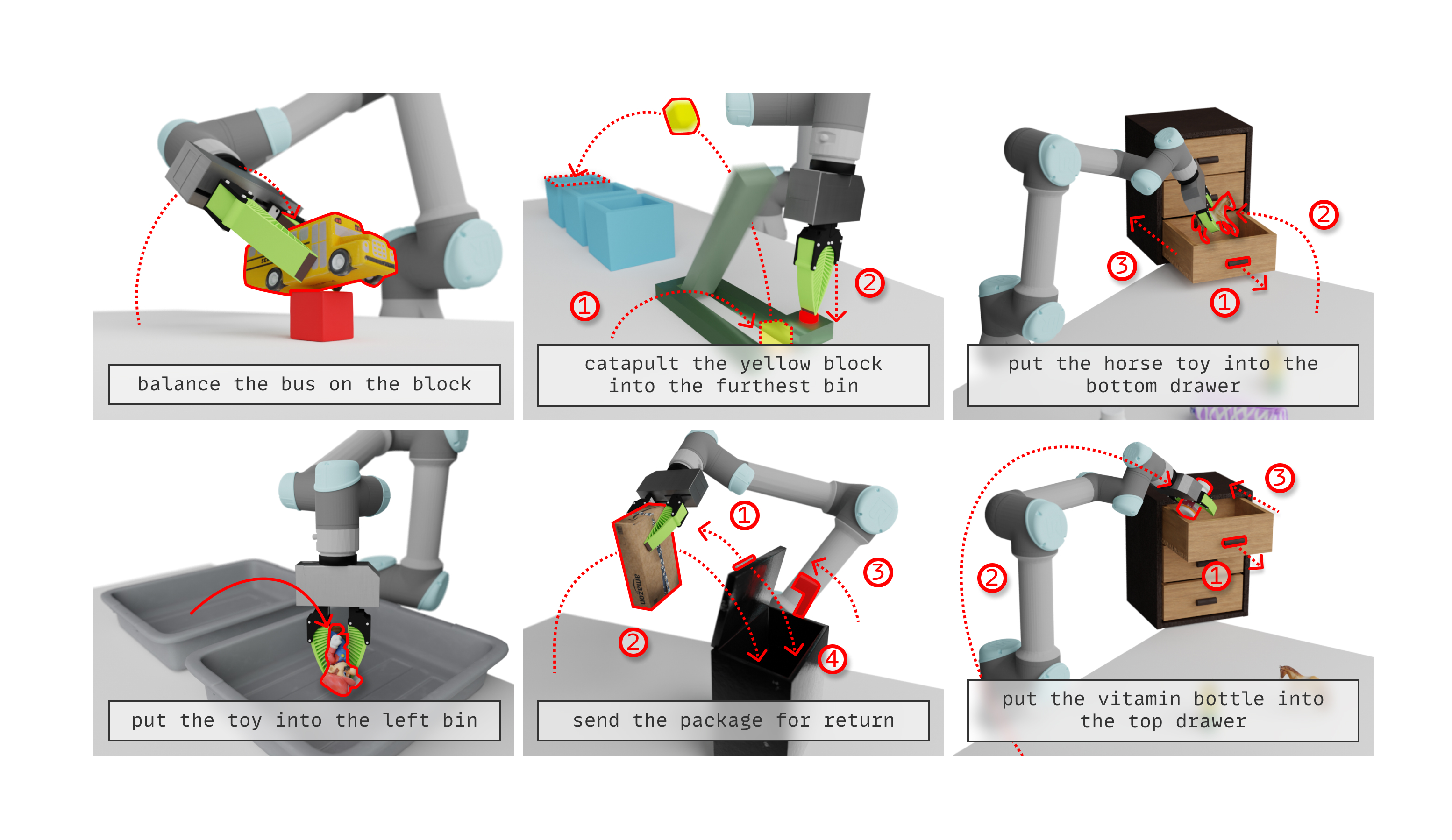
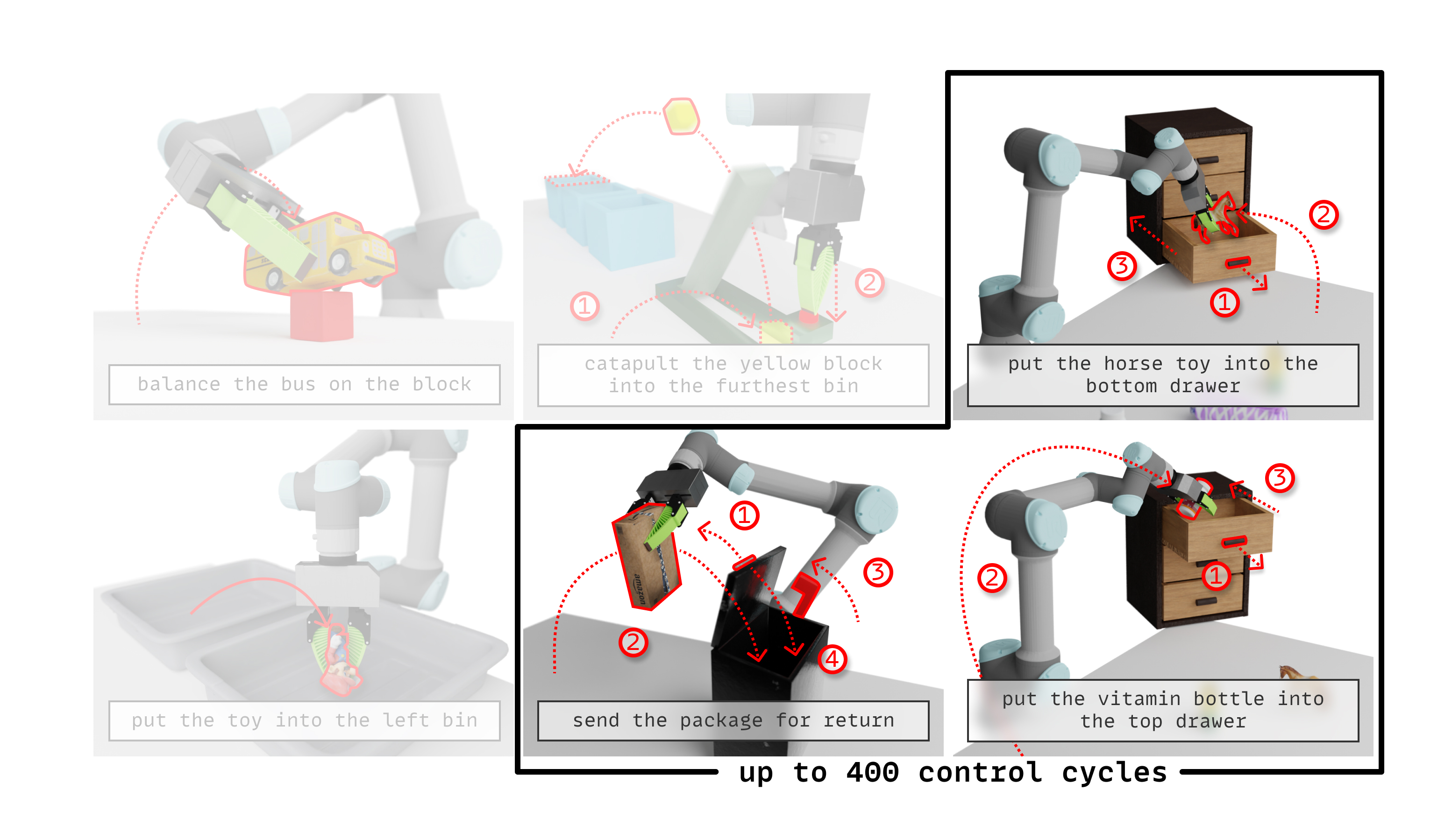
Scale up Language-labelled Robot Data Generation
Scale up Language-labelled Robot Data Generation
✅ rich manipulation skills
✅ flexibility to novel tasks & domains
sampling-based planners generates diverse robot behavior
sampling-based planners generates diverse robot behavior
(succeeds some of the times)
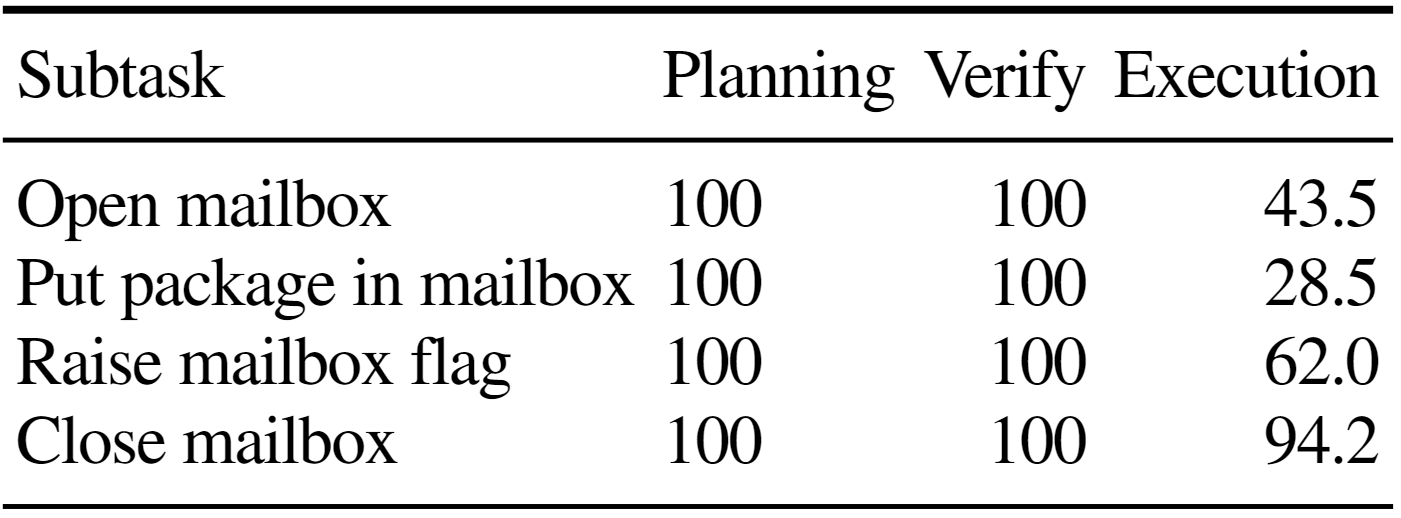
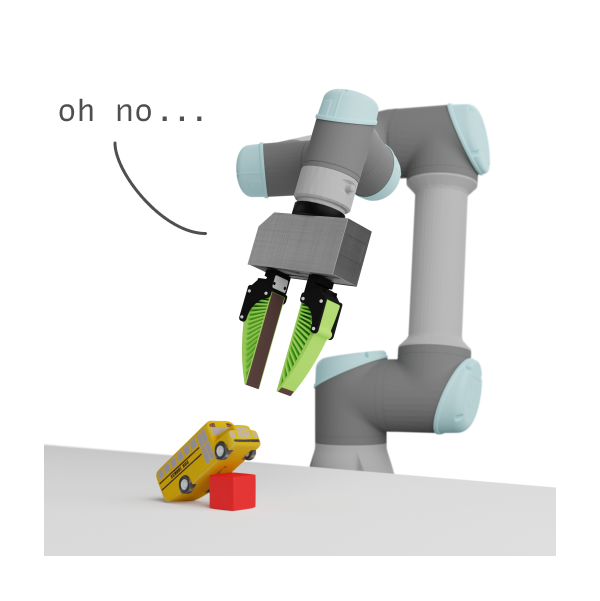
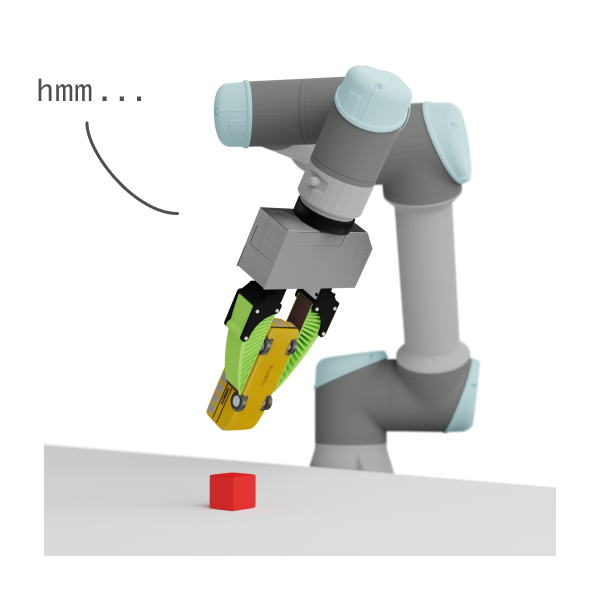
Verify-and-Retry


def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
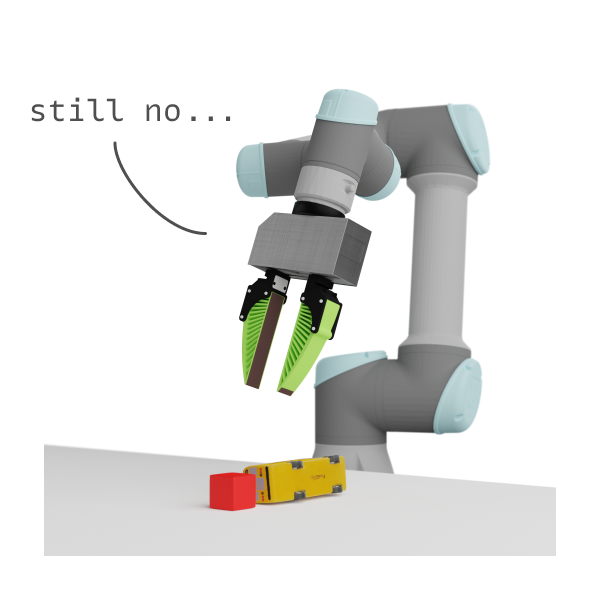
Verify-and-Retry
❌
def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
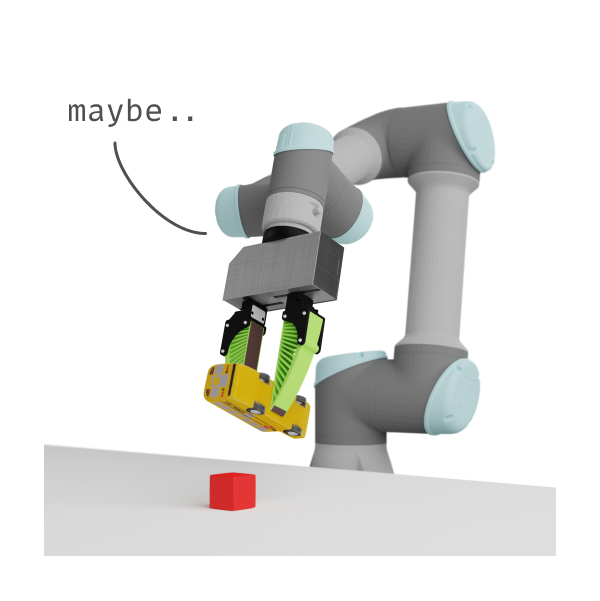
Verify-and-Retry
def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry
def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry

def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry
❌
def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry

def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry
def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry

def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry
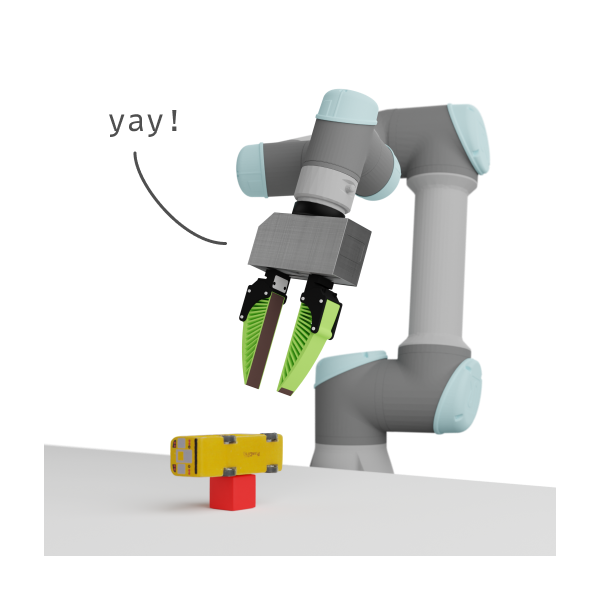
✅
def bus_is_balanced_on_the_block(state) -> bool:
return is_on_top_of("bus", "block")
Verify-and-Retry
✅ Increases success rate
✅ Demonstrates retrying behavior
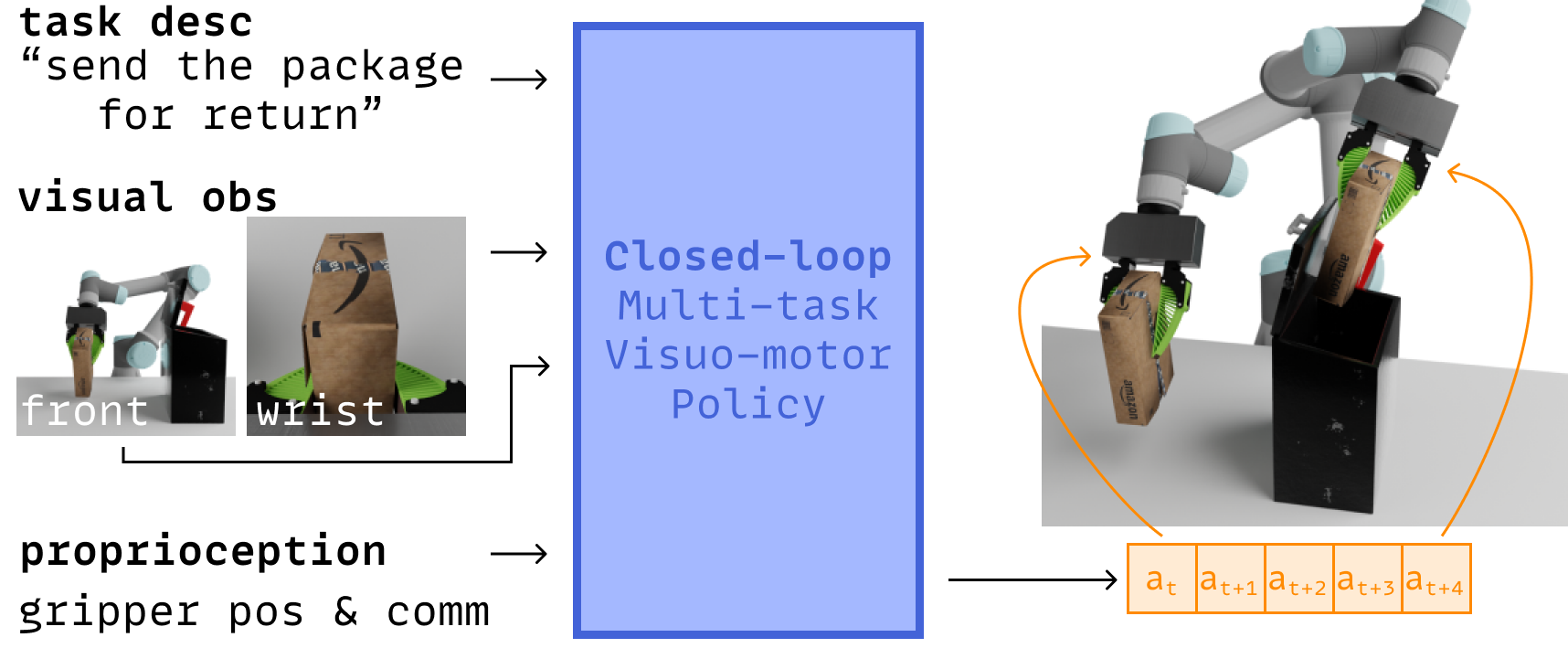
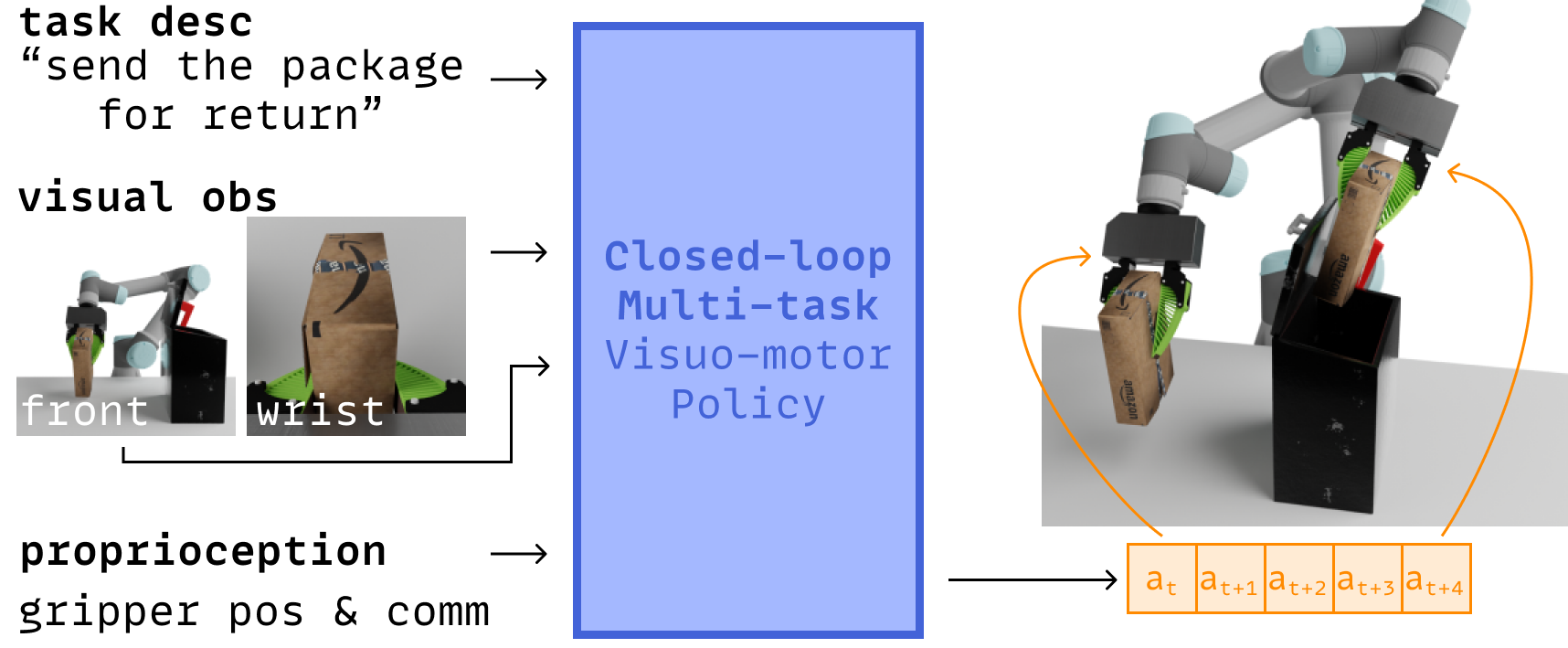
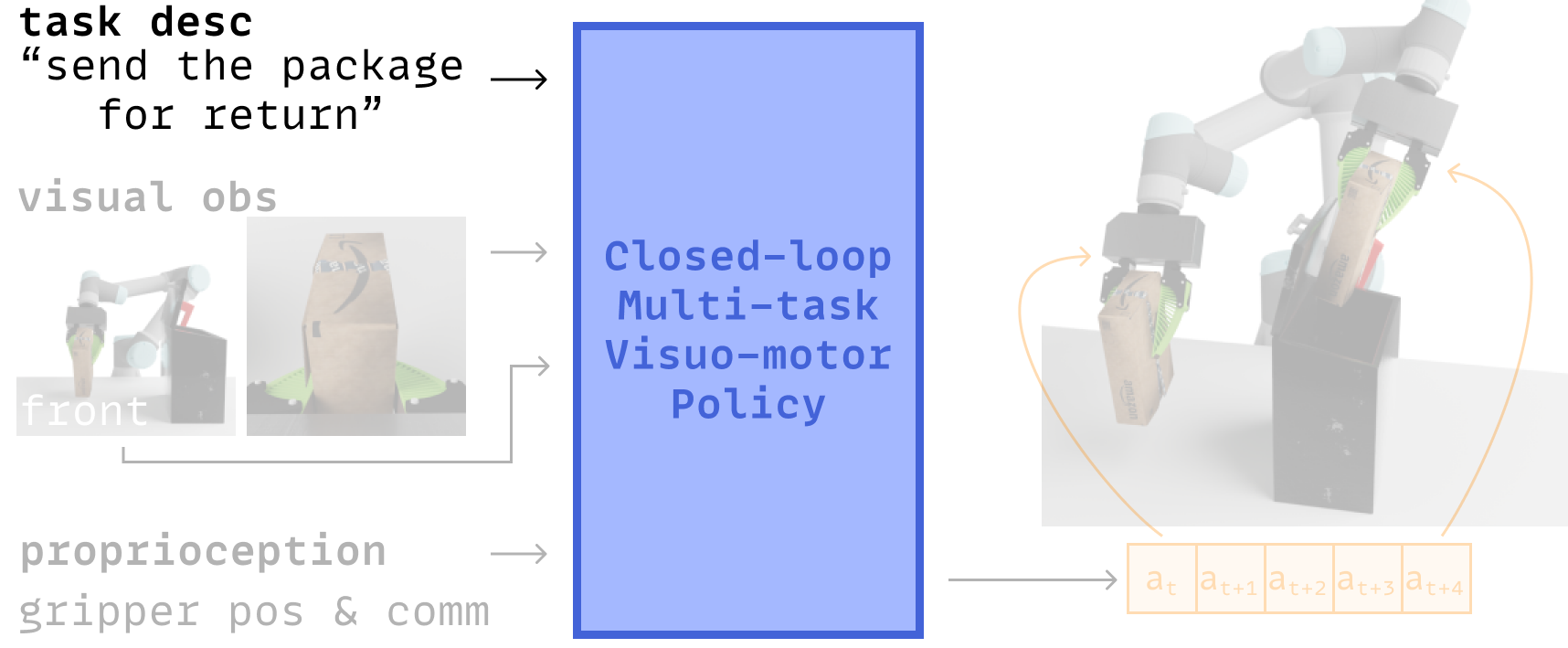
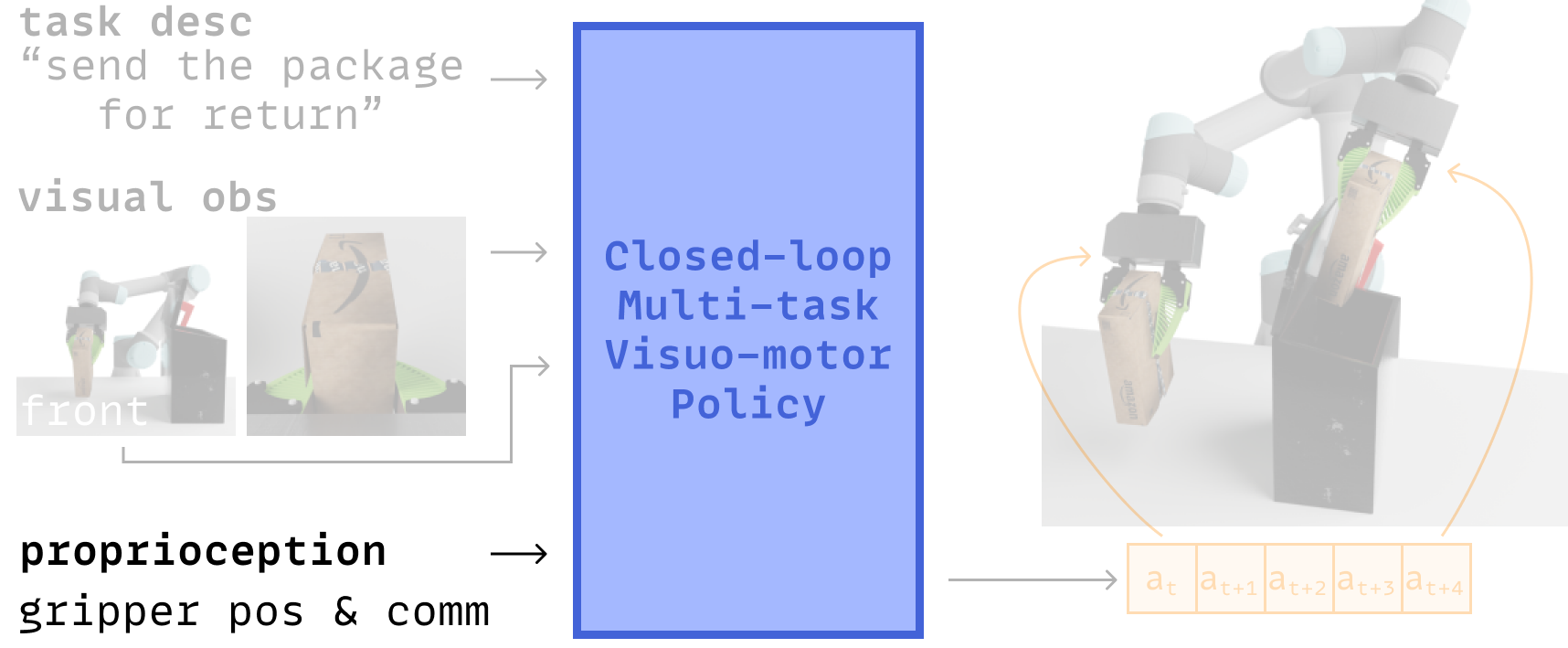
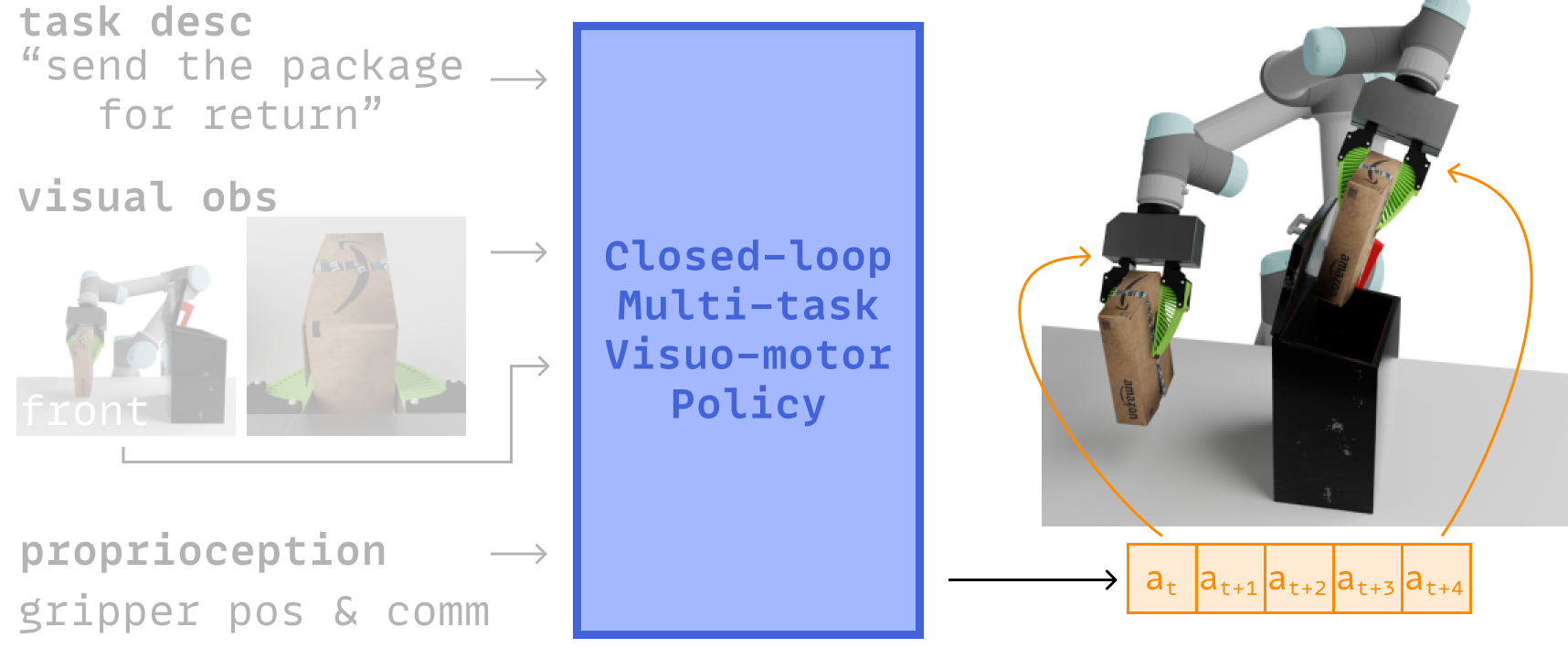
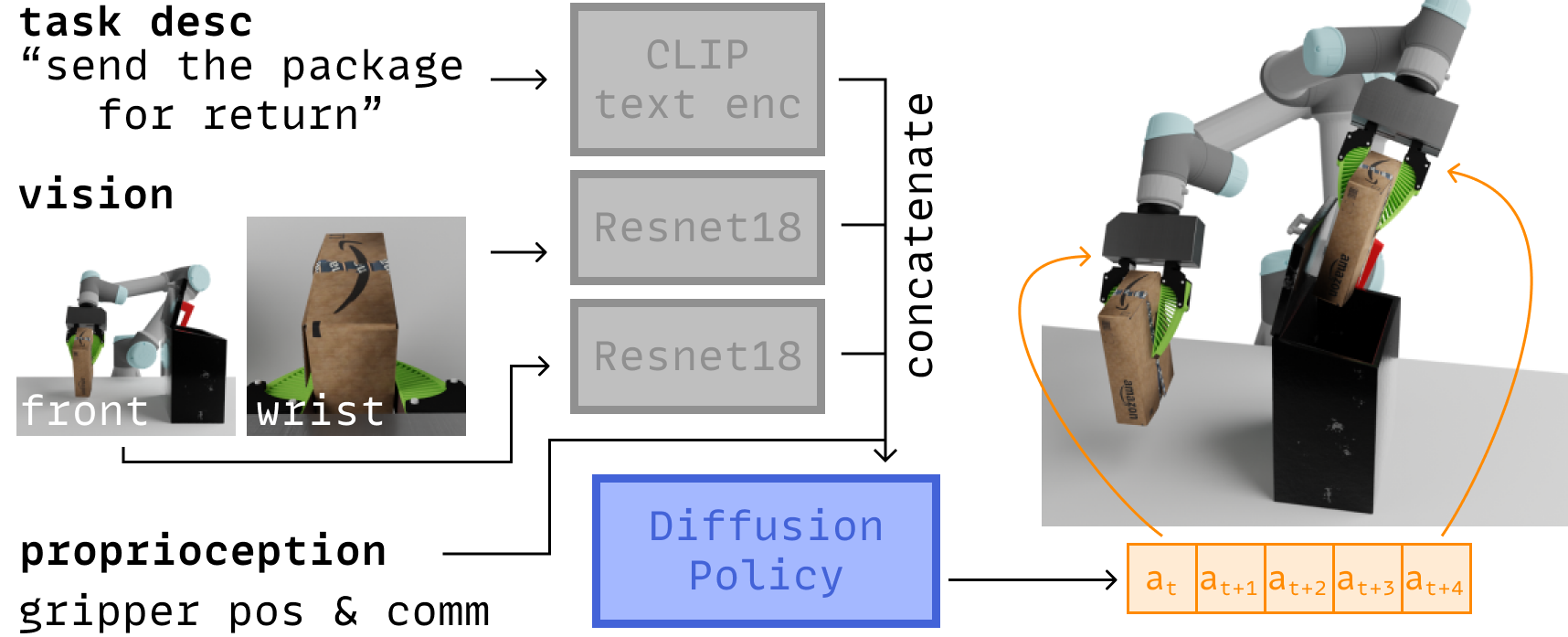
Distill Down to a Language-conditioned Visuo-motor Policy
Distill Down to a Language-conditioned Visuo-motor Policy

Distill Down to a Language-conditioned Visuo-motor Policy
Distill Down to a Language-conditioned Visuo-motor Policy
Distill Down to a Language-conditioned Visuo-motor Policy

Distill Down to a Language-conditioned Visuo-motor Policy
Distill Down to a Language-conditioned Visuo-motor Policy

Distill Down to a Language-conditioned Visuo-motor Policy
Distill Down to a Language-conditioned Visuo-motor Policy
Distill Down to a Language-conditioned Visuo-motor Policy
Distill Down to a Language-conditioned Visuo-motor Policy

Evaluation
Evaluation
Evaluation

Evaluation
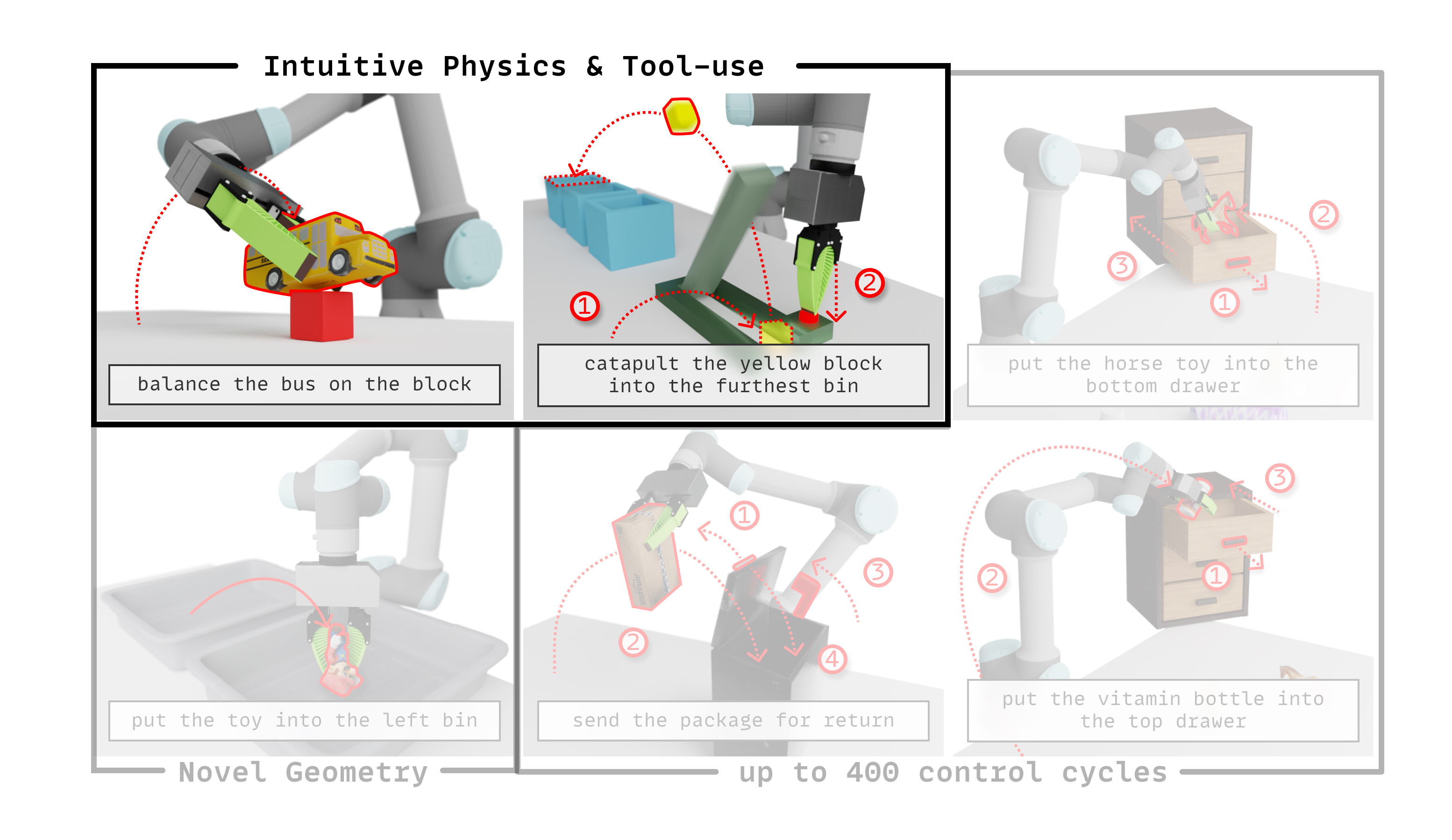
High Entropy, Precise Actions
Distilled Common Sense
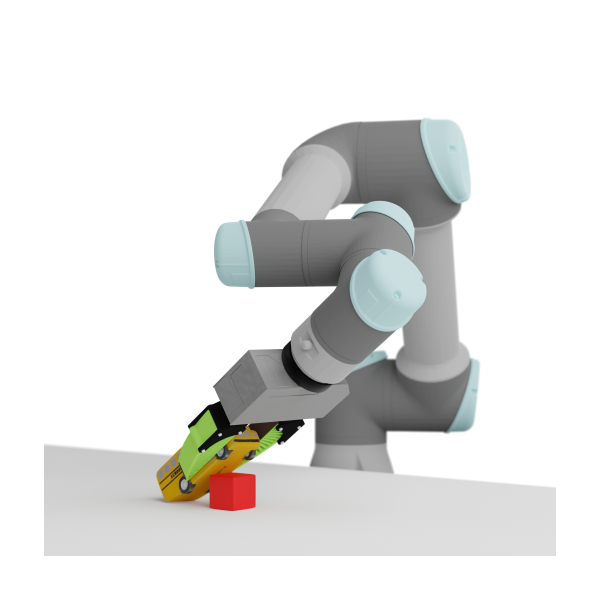
Data Generation Results
Data Generation Results
Data Generation Results

Data Generation Results
Distilled Retrying Behavior
Distilled Policy Results
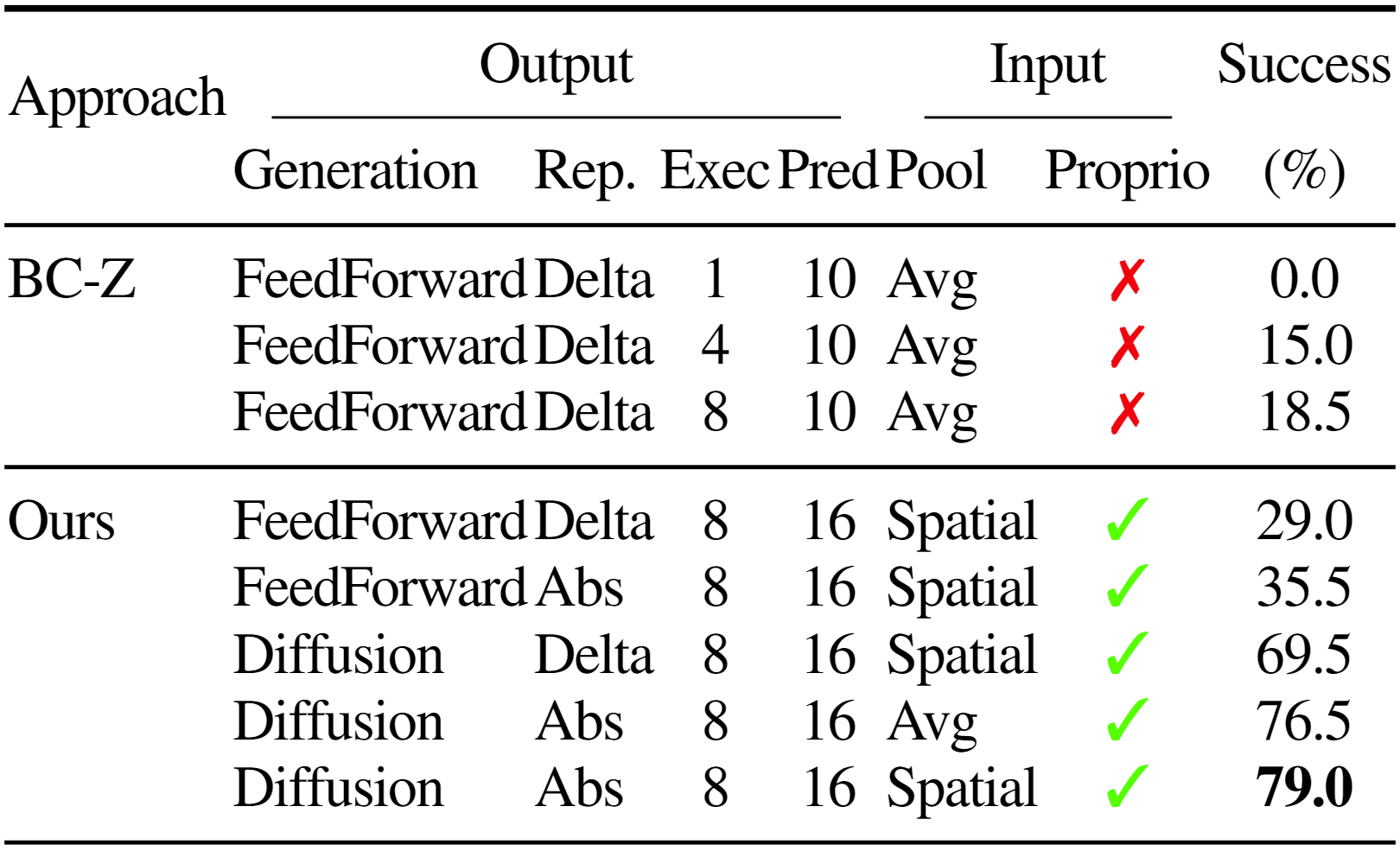
High Distilled Performance from Diverse Attempts
Real-world Deployment With No Fine-tuning
Real-world Deployment With No Fine-tuning
A Framework for Scalable Skill Learning
A Framework for Scalable Skill Learning
A Framework for Scalable Skill Learning

A Framework for Scalable Skill Learning

The Language-guided Automation Recipe
The Language-guided Automation Recipe
guide

Google Bard , Google Blog
OpenAI GPT-4 , Unite.AI
The Language-guided Automation Recipe
A Robot Skill Learning Workflow
A Robot Skill Learning Workflow
A Robot Skill Learning Workflow
Language-guided Robot Learning
Language-guided Robot Learning
TidyBot , Wu et al, IROS 2023
Language-guided Robot Learning
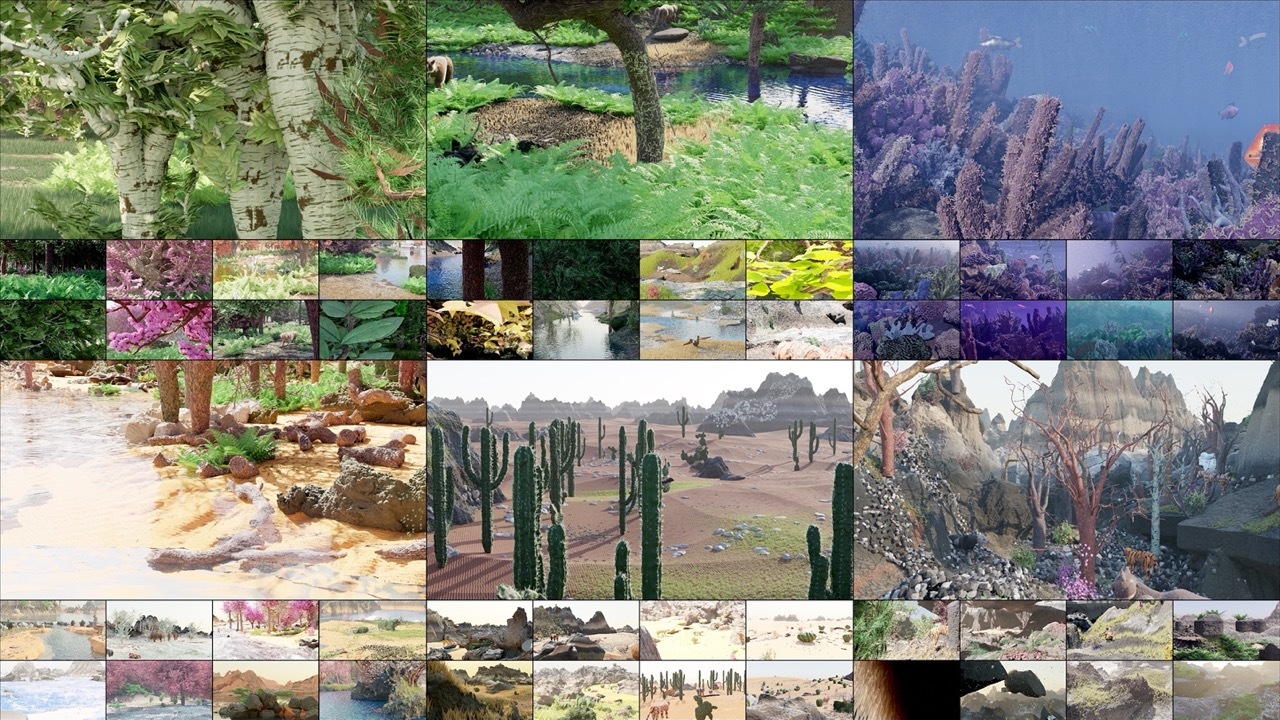
Infinigen , Raistrick et al, CVPR 2023
How we can put robotics on the same scaling trends as large language models while not compromising on robust manipulation and control?
Future Work
Limitations
- Sim2Real. Online adaptation to novel visual & physical domains.
- Trajectory Generation. More embodiments and tasks.
- Asset/Environment Design. Procedural & learned approaches.
Opportunities
- Policy Scalability. A trade-off between inductive biases and expressivity.
- Data Investigation. Fix the algorithm, control data generation.
Scaling Up and Distilling Down
Language-Guided Robot Skill Acquisition
www.cs.columbia.edu/~huy/scalingup/
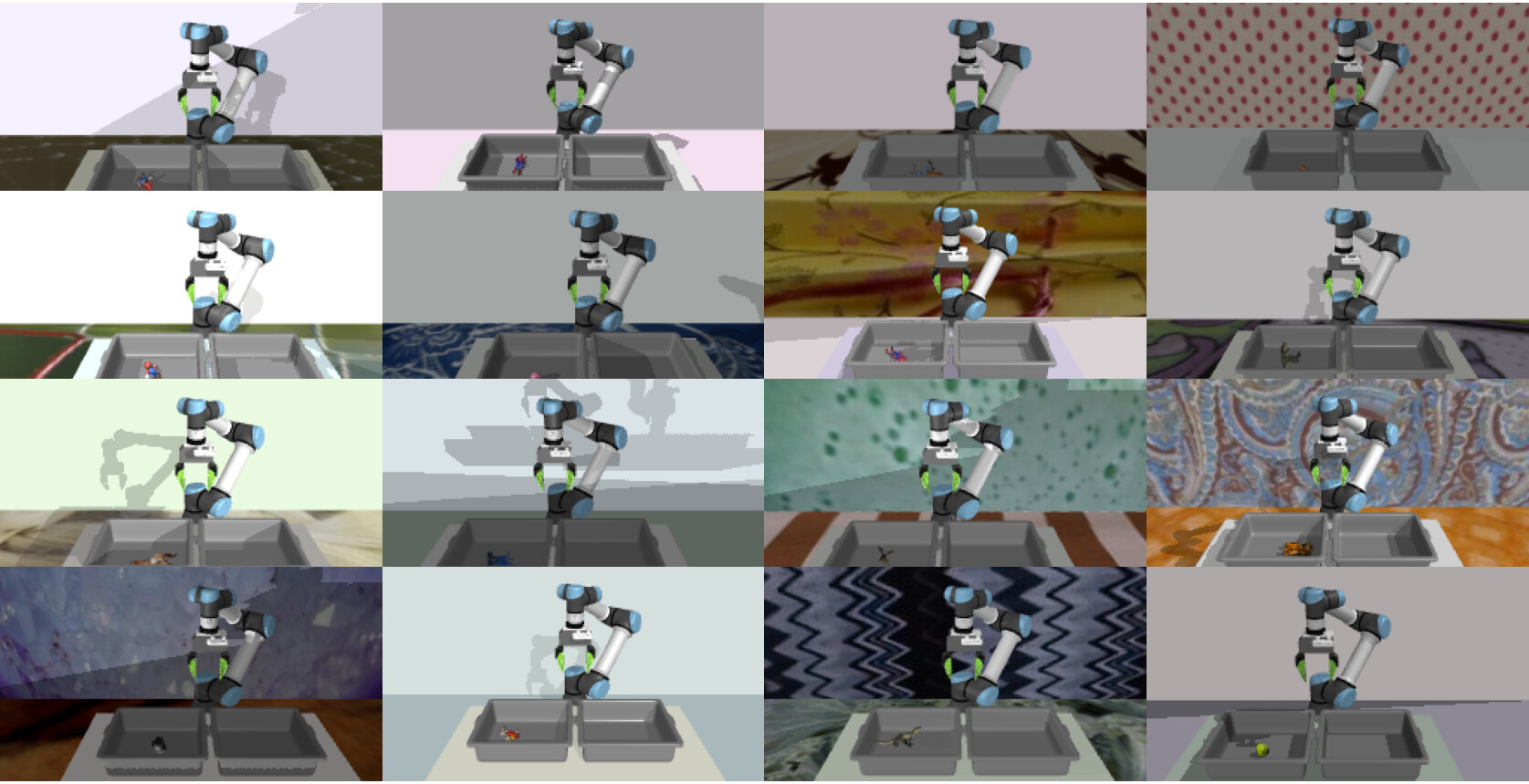
Domain Randomization
Full Sim Results
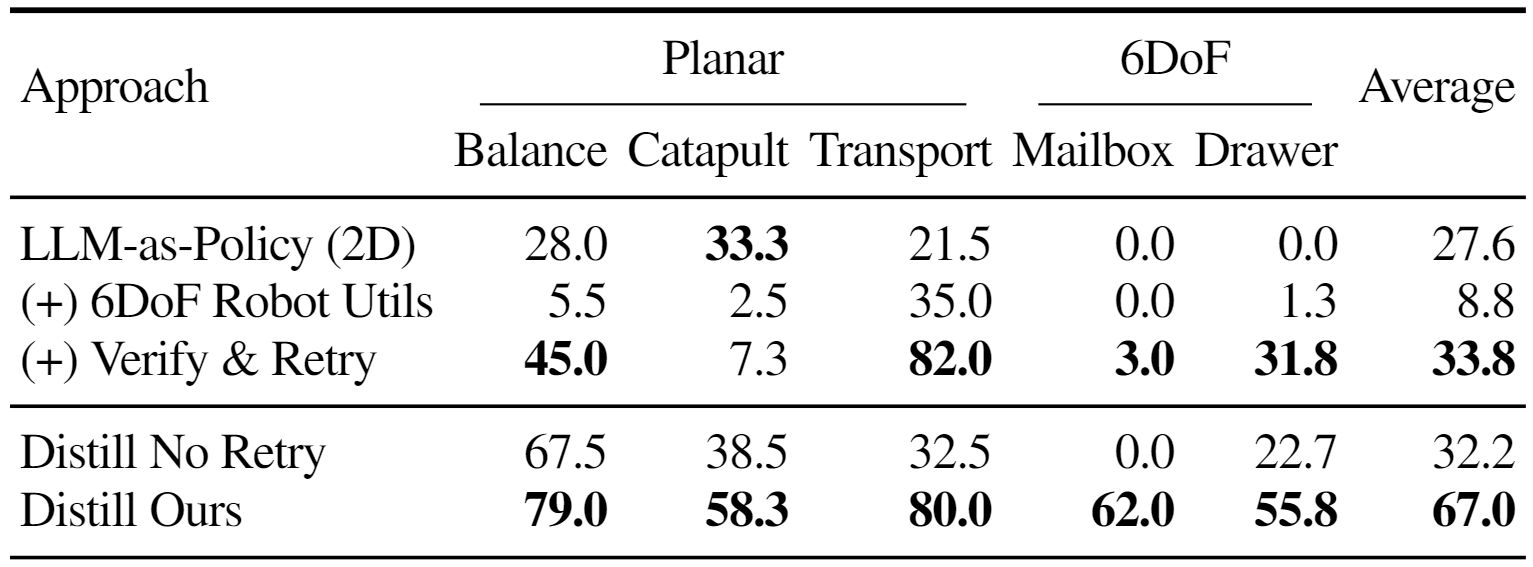
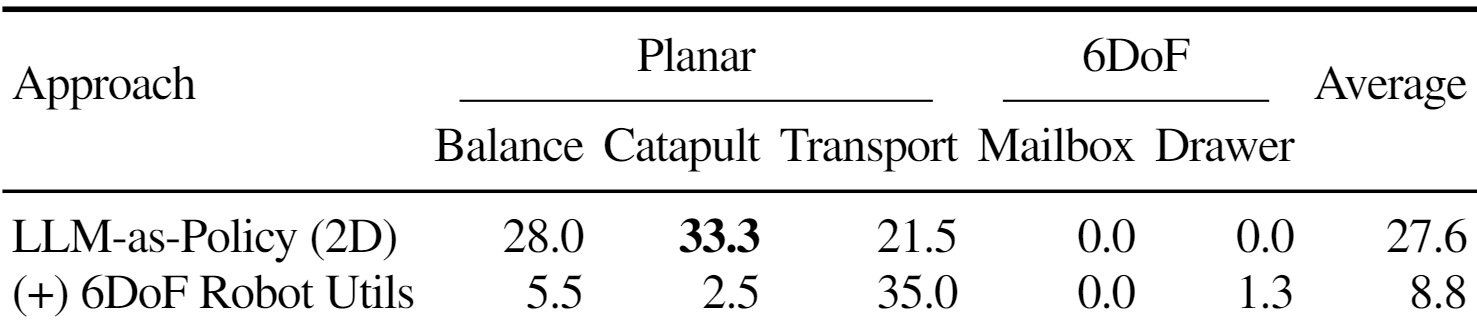
Policy Ablations
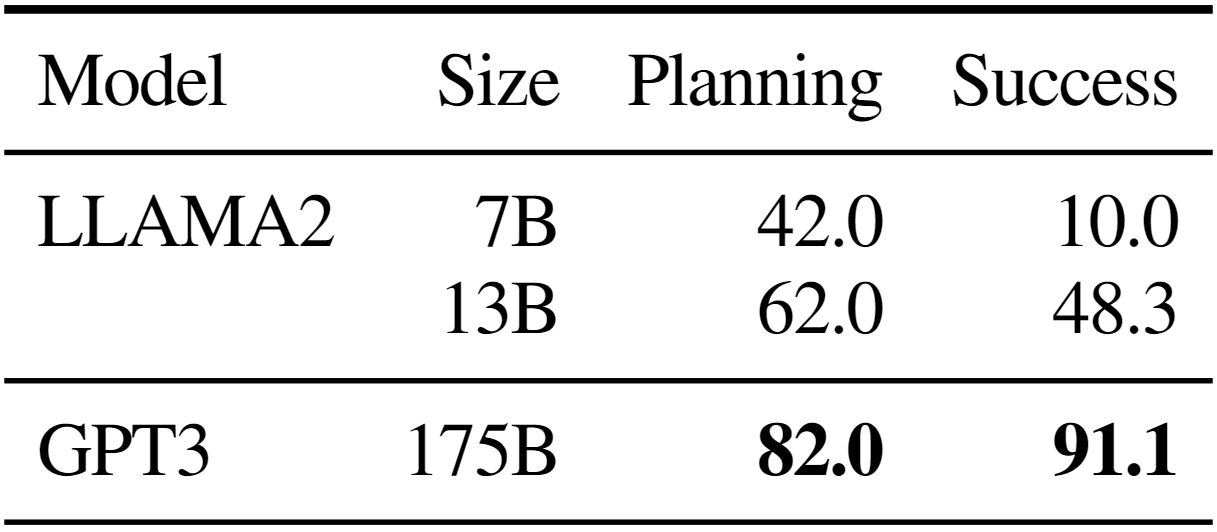
Language Model Ablations
Error Analysis