[Previous][Up][Next]
Localized Men on Mission Strategy
This strategy attempted to improve on the Men on Mission player from
last year and was successful in doing so in a variety of game
configurations. The strategy takes advantage of the fact that robots
are more effective at creating rectangles close to their current
position rather than drawing ones farther away. This notion led to a
localized rectangle searching algorithm that is much more focused and
efficient than a randomized search or a brute force search.
I. Basic Algorithm and Analysis
Here is some pseudocode explaining the algorithm:
Compute: maxDelta = n * RISKINESS
For each robot r with position p, perform:
- If the robot is already building a rectangle R,
continue building
it, unless its associated score S(R) (explained below)
drops down to zero.
- Otherwise, iterate over all rectangles with one vertex at
p, such
that the rectangle's length and width is at least three, and the
perimeter does not lie on filled cells, and the length and width are
both bounded by maxDelta.
- For each rectangle found matching the above criteria, count
the number of unfilled cells on the interior. This count will be
the score S(R) for that rectangle.
- Save the coordinates of the rectangle R with the
highest score.
- If the highest scoring rectangle has a score of at least one,
build a state machine for the robot, instructing it to
move to the opposite corner of the rectangle, since p is
already one of the corners.
- Else, if the highest score is 0, do not draw the
rectangle. Just keep moving.
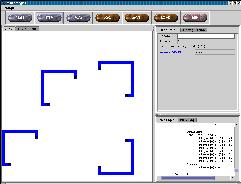
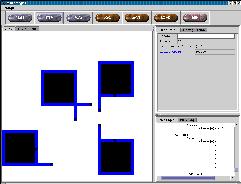
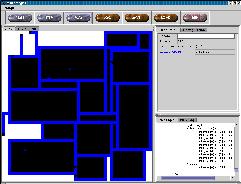
|
|
|
|
Round 5 |
Round 27 |
Round 113 |
|
This strategy has several advantages over a randomized search:
- The robots are able to build more quickly since no movement is
required to get into the starting position.
- If a robot has no unfilled cells around it, it will move around
the perimeter of the board until it finds unfilled cells. This means
that the robots will systematically search for free space. At the
same time they will act as guards against the opponent drawing a
rectangle around the entire perimeter, an important defense in a 2
player game.
- The parameterization of the RISKINESS factor makes it
easy to adjust how agressive the player should be. For a more
agressive player this value can be set to 0.5. For a more
conservative player, this value should be less than 2.5.
- Since the robots go for rectangles that are near rectangles they
have already constructed, they are more likely to reuse existing
rectangle borders in building new rectangles. This means that much
of the time, the robot will only have to one or two edges before the
rectangle is completed. Since the score of the rectangle is checked
every time in Step 1, we will stop drawing the rectangle as soon as
it is either complete or no longer viable.
- This strategy is also good at finding the last few free areas in
the later stages of the game. When faced with this considerable
advantage, Group 1 decided to incorporate it into their own player
in order to complement their main strategy. As a result, Group 1
performed as well or better than our player in many games.
One major problem with this approach is that unless an opening is used
where a lot of territory in the middle is taken up, it will be
difficult for the robots to find and claim free space that is not in
their immediate vicinity. Similarly, the algorithm does not guarantee
that the robots will choose the optimal rectangles to draw at any
given time. To address these problems, we began developing a
modification to the player to make it more flexible.
II. Improving the Basic Algorithm
One approach that we liked from the Men on Mission player was its
inherent ability to discover large patches of free space. To mimick
this behaviour we coded the following modification:
- At the start of every turn, sample random locations on the board
and check if those locations are in an area of free space. Give each
location a score based on the number of unfilled cells that are
nearby.
- For each robot:
- If the highest scoring rectangle at our location has score
zero, check the list of board samples.
- Assuming the list is not empty, take the sampled location with
the highest score.
- Build a state machine to instruct the robot to move to that
location.
- Once relocated, the robot should continue with the Basic
Algorithm.
This procedure will effectively for robots in highly filled
locations to move to locations that are more open. Unfortunately, the
robots can be stuck at local minima in terms of rectangle score,
preventing them from taking this alternative route. Secondly, if the
robots do not move along the perimeter, then the player is danger of
losing to the naive shoot-the-moon strategy.
III. Pseudo-cooperative Behaviour
Although the framework we used allows for the creation
of teams of robots employing different strategies, we chose not
concentrate on that aspect for this particular player. Instead this
player was meant to demonstrate our most effective yet stable
offensive strategy. Taking advantage of more complex cooperative or
adaptive behaviour, is discussed in the Strategies Switching section.
However, we did make some modifications to the player so that it
would appear as if the robots cooperated in groups of two. To achieve
this, we initialized the robots in pairs. Each pair acted as a team
such that the first robot would build a rectangle by moving east/west
and then north/south, while the second robot would build in the
opposite order. The effect of this is that the robots would build
rectangles simultaneously as long as they we in the same
location. This strategy was useful in the beginning when fast
expansion is critical.
IV. Tournament Results and Future Work
Here are some highlights from the tournament results for this player:
| Rank |
Number of Robots |
Number of Players |
Board Size |
Comments |
| 1st |
2 |
4 |
40 |
| 1st |
5 |
6 |
50 |
| 2nd |
3 |
6 |
50 |
| 2nd |
2 |
6 |
50 |
| 3rd* |
10 |
2 |
40 |
Highest ranking non-chaser |
| 3rd |
3 |
2 |
50 |
The results show that our player was particularly effective in games
with fewer robots per player and many players. Aside from the two
players that employed a chasing strategy (our newest anti-chasing
implementation was not complete in time for the tournament) our player
was also the best in the more standard 10-robot, 2-player scenario
(*).
We expect that our player's performance in games with many robots will
improve with better cooperation among the robots. Some key features
that are missing include:
- Improved logic for cooperative rectangle tracing
- Optimal rectangle tracing
- Rectangle size vs. risk calculation
- More intelligent anti-chasing algorithm that monitors the length
of its trail. If the length of the trail doesn't change for several
consecutive moves, the robot should stop and wait until the chaser
goes away.