Contact:
Prof. Peter K. Allen (allen@cs.columbia.edu)
Current Research Projects
Dynamic Grasping with Reachability and Motion Awareness
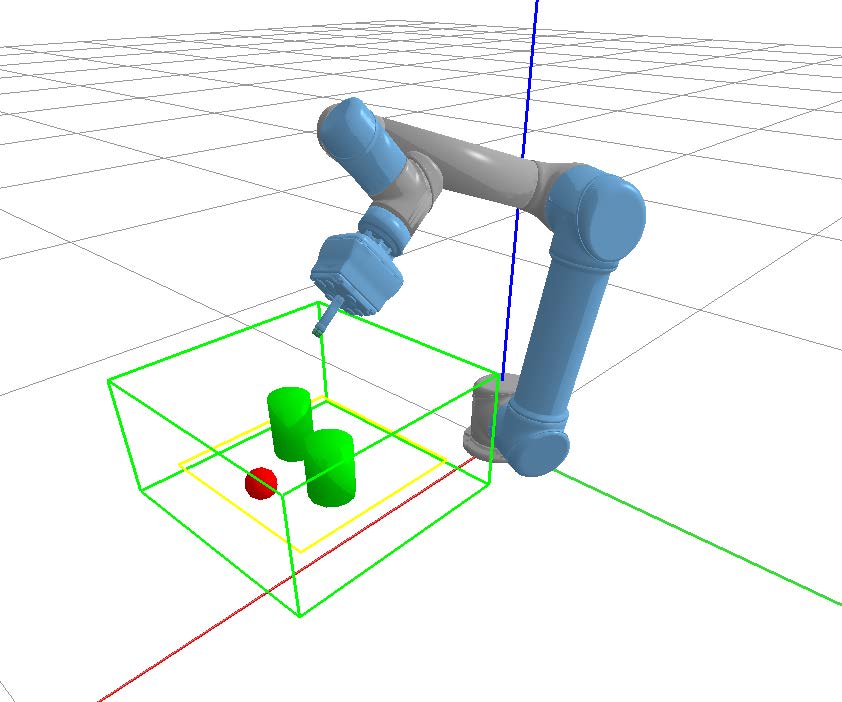
CLAMGen: Closed-Loop Arm Motion Generation via Multi-view Vision-Based RL
Learning for Navigation
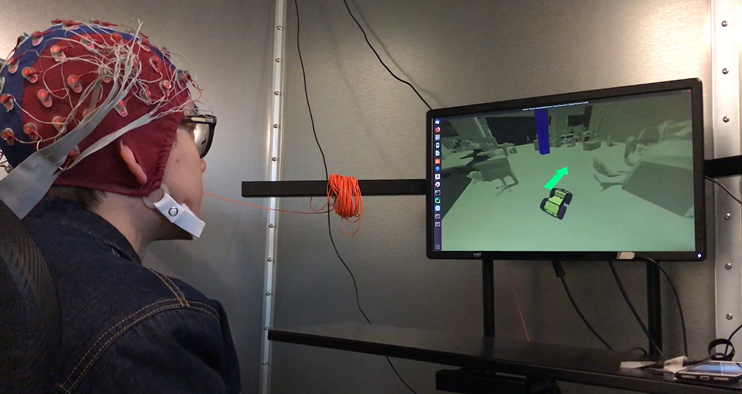
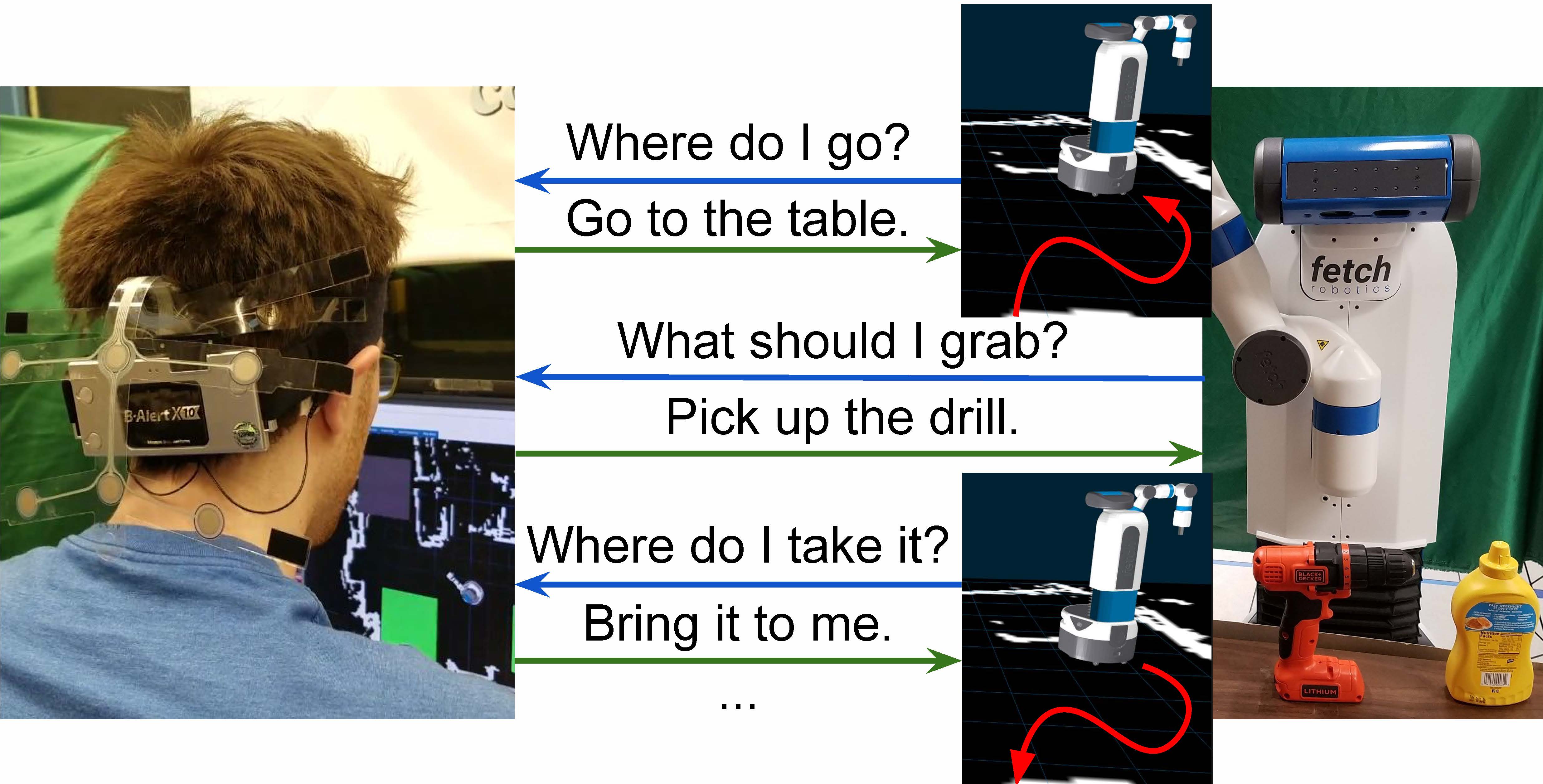
Brain Guided Reinforcement Learning
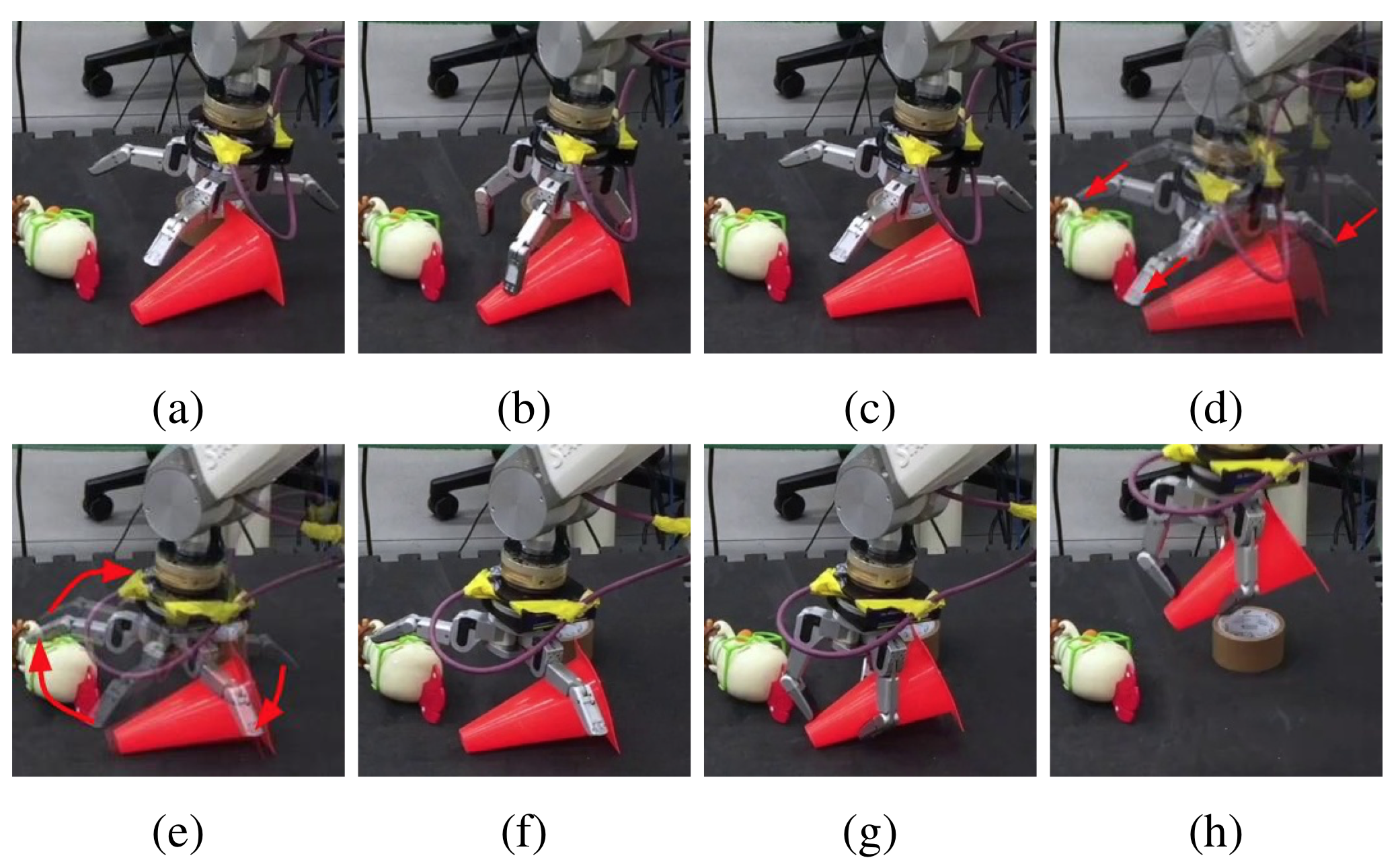
MAT - Multi-Fingered Adaptive Tactile Grasping via Deep Reinforcement Learning
Pixel Attentive Grasping
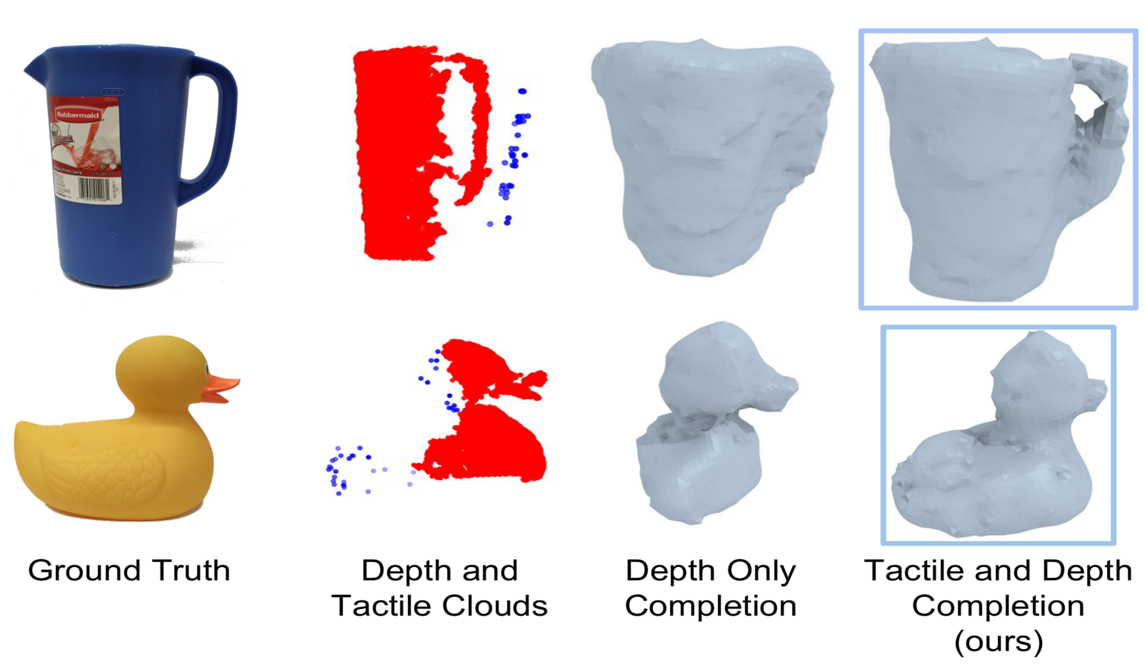
Multi-Modal Geometric Learning for Grasping and Manipulation
Multimodal Brain Computer Interface for Human-Robot Interaction
Shape Completion Grasping
Dexterous Manipulation Using Predictive Thin-Shell Modeling
Assistive Robotics: Brain Computer Interfaces for Grasping
Surgical tool Tracking
In-Vivo Surgical Imaging System
IREP: Insertable Robotic Effector Platform
Computational Tools for Modeling, Visualizing and Analyzing Historic and Archaeological Sites (NSF ITR Project)
AVENUE: Autonomous Vehicle for Exploration and Navigation in Urban Environments
GRASPIT! A Versatile 3-D Grasping and Simulation Tool
Protein Streak Seeding
Protein Crystal Mounting
Visual Servoing: A Partitioned Visual Feedback System
Integration of Vision, Force and Tactile Sensing for Grasping
Past Research Projects
Tracking and grasping moving objects
Active Uncalibrated Visual Servoing
Eye-hand control
Machine Vision Planning
Autonomous Precision Manipulation
Haptic Sensing
Object-Space Teleoperation
Human Dexterity and Motor Control
8-Degree of Freedom Robot
Interactive Tutorials for Machine Vision
Left Ventricle Assist Device Simulator