
Voices of CS: Cheng Chi
Second-year PhD student Cheng Chi talks about how his research on robotic control won a Best Paper Award at RSS 2022
In the Columbia Artificial Intelligence and Robotics (CAIR) Lab, Cheng Chi stands in front of a robotic arm. At the end of the arm sits a yellow plastic cup. His goal at the moment is to use a piece of rope to hit the cup to the ground.
“I never thought I would have to do this as part of a research project,” said Chi, a second-year PhD student. He was conducting the exercise to gain a better understanding of physical movement and how it can be applied to a robotic control system.
Existing robotic systems struggle to precisely manipulate objects with complex dynamics, such as hitting a small target with a whip or swinging tablecloths to an exact location. While these tasks are quite hard even for humans, we usually have a good intuition about how to change our actions after a failed attempt, and iteratively get closer to the goal.
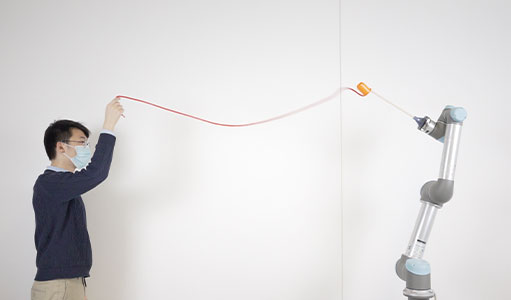
Chi was able to knock the cup off after five tries. Now, it’s the robot’s turn to fling the piece of rope. It takes the robot four times to hit the target during the experiment (in general less than 10 times). The algorithm/neural network was trained in a simulator using a large amount of data. The robot, called Oolong, had to hit a target and was tested on different kinds of ropes it had never seen before.
Together with Assistant Professor Shuran Song and colleagues from the CAIR Lab, Chi worked to formalize this intuition into an algorithm called Iterative Residual Policy (IRP), a general learning framework for repeatable tasks with complex dynamics where a single model was trained using inaccurate simulation data. IRP can learn from that data and hit many targets with unfamiliar ropes in real robotic experiments, reaching sub-inch accuracy, and demonstrating its strong generalization capability.
This research brings robots from factories, where everything is rigid and can be accurately modeled, closer to everyday households filled with dirty laundry, raw vegetables to be washed in the sink, and leftover food to be cleaned from the fridge. It could potentially alleviate the labor shortage in food, retail, and logistics due to the aging population in many parts of the world. This could also enable the automation of simple tasks like changing bed sheets and badges in hospitals with infectious disease patients.
The team won a Best Paper Award at the Robot Science and Systems Conference (RSS 2022). We caught up with Chi to find out more about his research and PhD life at Columbia.
Q: How did you become part of the research project?
This is part of a grant from the Toyota Research Institute on deformable object manipulation. For this specific project, I wanted to explore more complex and dynamic forms of robotic manipulation and control. As the primary researcher of this project, I decided on the research topic, problem, and task.
Q: How long did you work on the project? What did you have to do, or read to prepare to make the system?
The project started in May 2021. I did a lot of research about control theory for underactuated systems, chaos, and how to work with robot hardware.
Classical robotics literature divides the operation of a robot into three stages — perception, planning, and control. In my previous research, I studied perception and the planning stage of robotics. However, I realized that my knowledge still has a noticeable hole in control theory and systems that control the function and movement of robots.
I believe that I will never become a full-fledged roboticist without understanding all parts of robotic operations. Therefore, I intentionally steered this project toward control which allows me to read more into control-related literature and classes.
For example, I went over the YouTube recording of MIT’s underactuated robotics, taught by Professor Russ Tedrake, who has been known for his contributions to the control of locomotion systems (such as Boston Dynamic’s quadruped robots).
Another interesting thing about control is that, unlike planning, the control of the human body mostly happens at a subconscious level. Therefore, understanding more about control also gave me more insight into how the human body works.
The key realization came after months of reflecting on how I achieved certain tasks and how to formulate such a problem.
Since the relatively early stage of this project (after I decided to tackle the rope whipping task), I had this lingering feeling that being able to adjust the next action based on the error of my previous action is critical for how humans accomplish this task (by observing myself doing it). But I wasn’t able to connect it with math and concrete algorithms.
The next few months were spent playing with data collected in simulations to understand the structure of this task and problem. I often spent a few afternoons a week just staring at my iPad notes, sketching potential algorithms that can solve this task efficiently. Most of them were futile. However, one afternoon in late September, I suddenly came up with the idea that connects my lingering feeling to this concrete algorithm. And the rest was mostly planning out experiments, executing, and verifying results.
Q: Why did you decide to do research on robotic control?
I decided on the research project jointly on what is missing in the field and what I wanted to learn. For example, I wanted to get into control last summer, so I took classes online and read relevant papers to build a foundation. I noticed that the missing piece in the field is deformable manipulation with precision.
Existing robotic algorithms often assume the object being manipulated is rigid, and ignore its physics/dynamics, due to its complexity. My research thrust has been targeting this complexity (of object physics and non-rigidity) head-on, which hopefully will result in better algorithms that will improve the overall performance and robustness of robotics systems, outside of confined/structured industrial environments.
Whipping a piece of rope is one of the simplest instances of dynamic deformable object manipulation, without the additional perceptive complexity such as self-occlusion, etc. However, we believe that whipping a piece of rope and tablecloth is representative of the class of problem we are interested in and that there is no existing robotic system/algorithm that can accomplish this task. Therefore, our algorithm has expanded what is considered possible in robotics.
I thought that it would be cool to simplify it to a minimum-working task, like whipping. Whipping a piece of rope or cloth accurately requires adapting existing skills which humans are good at but it is very difficult for robots to do.
Humans can hit targets with reasonable accuracy after usually 10~20 trials. The best algorithm before IRP takes 100-1000+ trials to get there.
The project spanned 10 months and it was not easy, since solving this novel and challenging task requires going beyond the common paradigm in the field, for example, reinforcement learning or system identification.
I tried three ideas at first and none of them worked or advanced the field to a satisfying degree for me. The final idea was inspired by some studies from the biomechanics/neural science community that I came across while doing research.
While I was struggling with this project, my advisor pointed me to this recording of an RSS 2020 workshop. I was fascinated by one of the talks by Professor Dagmar Stenard and her findings from the biomechanical perspective of how humans minimize uncertainty and avoid the chaotic region of the state space when taking actions.
I read further into her publications and was pleasantly surprised that her group was studying the same rope-whipping problem. Their algorithm was crude and they only tested in simulation with many additional assumptions, but I really liked their problem formulation of the whipping task and their use of action primitive, which dramatically reduced the number of parameters needed to describe the dynamic and continuous robot action.
They also demonstrated that their action primitives (that bio literature believes humans also use) are sufficient for this task. Therefore, I took their problem formulation and tweaked their action primitive to better fit real robotic hardware, and eventually developed the IRP algorithm on top of that.
Q: Why did you decide to use different kinds of ropes for the project?
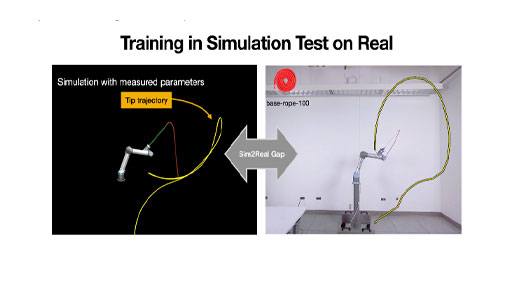
The type of rope we simulated for training is modeled after a thick cotton rope we bought on Amazon. However, due to the various complex physical properties and their effects, the rope modeled in simulation behaves significantly differently from its real-world counterpart. This is an instance of a well-known challenge in the robotics community called “sim2real gap”.
Since the deep-learning revolution (~2014), a large body of robotic algorithms emerged that have shown very promising results in simulated environments. However, they also rely on a large amount of data for training (our algorithm included), which is only feasible to collect in simulation. If the behavior of objects in simulation matches exactly their counterparts in real life, in theory, we can directly apply these data-hungry algorithms to the real world. Unfortunately, this is far from the truth, and the difference is especially big for deformable objects.
The biggest contribution of this paper is providing a solution to close this “sim2real gap” for a limited class of problems (where the actions are repeatable, and the objects can be reset to the original state), i.e. the algorithm behaves just as good in the real world as in simulation, despite the simulation it was trained on is very “wrong”.
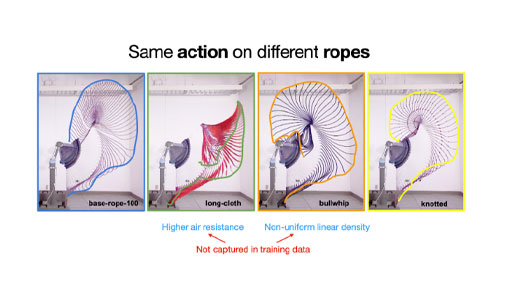
To further demonstrate how “wrong” the simulation can be while the algorithm still works, we cut out a long strip of cloth, that behaves like a gymnastic ribbon and treated it as the rope. We also bought a very thick leather bullwhip, that has a non-uniform density (it becomes thinner and thinner as it goes toward the tip), while all ropes we trained in simulation have uniform thickness and density. The experimental results on these two “ropes” were just as good.
Q: What do you think is the most interesting thing about doing research?
I like how researchers are able to try high-risk ideas that actually advance the field and also learn fundamental knowledge about the field. Working in industry usually constrains research options to low-risk ideas, while the engineering effort might be larger.
Q: How did your previous experiences prepare you for a PhD?
I gained my initial research experience during my undergrad at the University of Michigan, working on deformable object perception. I had multiple internships, as well as full-time jobs at autonomous vehicle companies, which taught me how to properly engineer a robotics software system.
Q: Why did you apply to Columbia and how was that process?
I applied to Columbia to work with Assistant Professor Shuran Song. Just before I graduated from undergrad, Shuran did a job talk at the University of Michigan. My undergrad research advisor Professor Dmitry Berenson was at her talk and he was really impressed. Berenson strongly recommended that I apply to work with her and he thought we would be a great fit. After researching her past publications, I did find a large overlap in our research interests and I only heard good words about her after asking other people who have worked with her.
At the time, I wasn’t really sure about getting a PhD, and because of the time needed to complete the applications, I only applied to two schools. The application website could have been improved, but the overall process is surprisingly smooth. I really like the idea that students are admitted by and to individual professors, and the professors make the decision.
Q: What has been the highlight of your time at Columbia?
The highlight of my time is being able to be taught and guided by my advisor, as well as other PhD students.
Q: You are starting the third year of your PhD at Columbia, do you think your skills have improved? In which ways?
I think what improved the most was to think more structurally and not be buried by the details. Due to the engineering complexity of robotic systems, there are thousands of variables and decisions, large and small, I needed to make for the project to progress. For example, on the high level, how to model the rope in the simulation, how to model the robot, how to represent the observation and actions, how the model should be architected, etc.
For an inexperienced researcher like myself, it is not obvious which one of these parameters will make or break the project, or will only yield a small change in the final performance. So, I over-analyzed, over-engineered, and over-thought the small problems. Fortunately, Shuran often called out that some of these decisions probably don’t matter that much, and choosing an arbitrary path to go forward is strictly better than spending time thinking about which one is better.
The problem is that this is mostly based on intuition. Shuran can’t always give evidence of why one thing doesn’t matter and why another does. But fortunately, I think I am getting a better grasp of these intuitions. It will become easier for me as time passes and I become an expert in robotics.
I also have found that it is really important to communicate clearly, both in meetings and when writing things down for reports or even emails. Learning by example from my advisor also helps a lot.
Q: What is your advice to students on how to navigate their time at Columbia? If they want to do research what should they know or do to prepare?
New students going into research should try as hard as possible to push through the first research project. It is always hard in the beginning, and it might feel impossible, but you can do it. Build up a tolerance for failure and continue to try different things, which is often critical to making a contribution to the field.